Physics Informed Neural Networks (PINN) in 5 Minutes
TL;DR: This blog introduces the high level ideas of physics informed neural networks [1] in 5 minutes. A simple implementation to solve a Poission’s equation with both PINN and finite difference is also provided.
- The toy implementation can be found here.
1. PINN Formulation
Consider the following general form of a PDE for $u(\boldsymbol{x})$ :
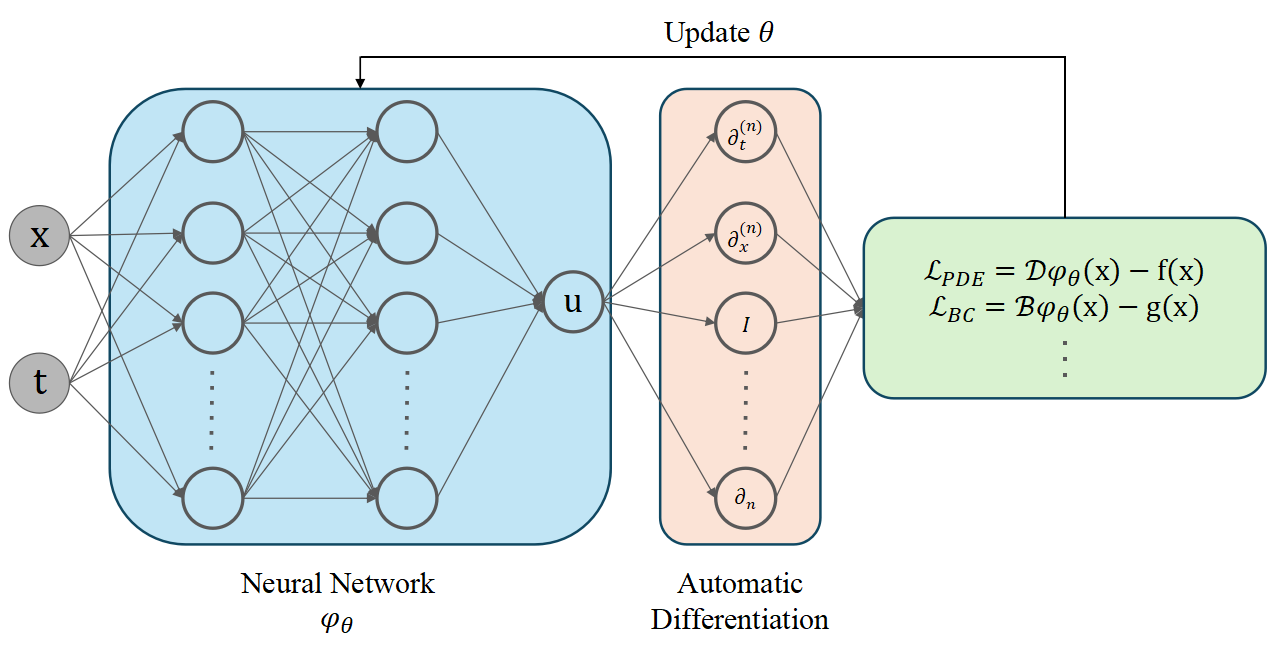
\[\begin{cases}\mathcal{D} u(\boldsymbol{x})=f(\boldsymbol{x}), & \text { in } \Omega, \\ \mathcal{B} u(\boldsymbol{x})=g(\boldsymbol{x}), & \text { on } \partial \Omega,\end{cases}\]we wish to approximate $u(\boldsymbol{x})$ with a neural network, denoted by $\phi(\boldsymbol{x} ; \boldsymbol{\theta})$. We can train the neural network with physicsinformed loss. That is, we aim to solve the following optimization problem:
\[\boldsymbol{\theta}^*=\underset{\boldsymbol{\theta}}{\arg \min } \mathcal{L}(\boldsymbol{\theta}):=\underset{\boldsymbol{\theta}}{\arg \min } \underbrace{\|\mathcal{D} \phi(\boldsymbol{x} ; \boldsymbol{\theta})-f(\boldsymbol{x})\| _ 2^2} _ {\begin{array}{c} \text { Difference between the L.H.S. and } \\ \text { R.H.S. of the differential equation} \end{array}}+\lambda\|\mathcal{B} \phi(\boldsymbol{x} ; \boldsymbol{\theta})-g(\boldsymbol{x})\| _ 2^2.\]- The neural network takes spatio-temporal positions as inputs and produce the function value at these positions as outputs.
- $\mathcal{D} \phi(\boldsymbol{x} ; \boldsymbol{\theta})$ can be approximated using the Monte Carlo method at collocation points.
Intuition: We penalize the neural network by the extend to which it violates the PDE/boundary/initial conditions. If the residual is exactly $0$, although nearly impossible, it means that $\phi(\boldsymbol{x} ; \boldsymbol{\theta})$ strictly satisfies the governing equations.
2. Sample Implementation
1. Use a feedforward neural network (fully connected network) to approximate the solution $u(x, y)$.
class FNN(torch.nn.Module):
def __init__(self, m):
super(FNN, self).__init__()
self.layer1 = nn.Linear(2, m)
self.layer2 = nn.Linear(m, m)
self.layer3 = nn.Linear(m, 1)
self.activation = lambda x: tanh(x)
def forward(self, tensor_x_batch):
y = self.layer1(tensor_x_batch)
y = self.layer2(self.activation(y))
y = self.layer3(self.activation(y))
y = y.squeeze(0)
return y
2. Sample points in the domain and on the boundary, respectively.
def generate_points_in_the_domain(N_1):
return torch.rand(N_1, 2)
def generate_points_on_the_boundary(N_2):
num = -(-N_2//4) # get ceil of N_2/4,
zero_to_one = torch.rand(num, 1)
# x1-x4 for 4 sides of the square, each num points
x1 = torch.cat((zero_to_one, torch.zeros_like(zero_to_one)), dim=1)
x2 = torch.cat((zero_to_one, torch.ones_like(zero_to_one)), dim=1)
x3 = torch.cat((torch.ones_like(zero_to_one), zero_to_one ), dim=1)
x4 = torch.cat((torch.zeros_like(zero_to_one), zero_to_one ), dim=1)
x = torch.cat((x1, x2, x3, x4), dim=0)
return x
x_1 = generate_points_in_the_domain(N_1)
x_2 = generate_points_on_the_boundary(N_2)
3. Calculate the Laplacian $\Delta u(x, y)$ (second derivatives with respect to $x$ and $y$ ) using automatic differentiation.
# calculate nabla u
def gradients(output, input):
return autograd.grad(outputs=output, inputs=input,
grad_outputs=torch.ones_like(output),
create_graph=True, retain_graph=True, only_inputs=True)[0]
# get the partial derivatives ux and uy
nabla = gradients(network_solution_1, x_1)
# uxx + uyy
delta = gradients(nabla[:, 0],x_1)[:, 0] + gradients(nabla[:, 1], x_1)[:, 1]
4. Define the loss functions.
loss_1 = torch.mean(torch.square(delta - 5))
loss_2 = torch.mean(torch.square(network_solution_2 - 1))
5. Training the model to minimize the total loss, which is a combination of the residual and boundary losses (with a weighting term lambda).
loss = loss_1 + lambda_term * loss_2
Full implementation can be found here.
References
[1] Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations, M. Raissi et al.